粘滑驱动(Stick-Slip)技术
工作原理
SmarAct粘滑驱动压电位移台配备了特定的驱动器,将宏观行程与纳米分辨率和每秒几毫米的高速结合在一起。粘滑压电驱动的工作原理如下所述。
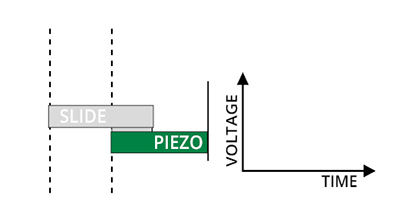 |
压电驱动器通过永久固定在驱动器上的摩擦元件与导轨的滑块连接。压电驱动器本身固定在平台的固定基座上。 |
|---|---|
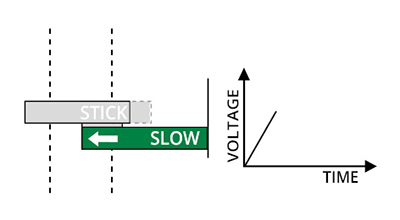 |
压电驱动器的长度与外加电压成正比。由于施加在压电陶瓷上的电压有控制的上升或降低,压电陶瓷会放大或收缩,滑块会跟随摩擦元件的运动。这个阶段称为粘固阶段(stick-phase)。 |
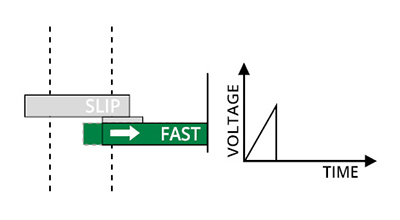 |
施加电压的急剧降低或增加将在很短的时间内导致压电陶瓷的缩短或延长,从而导致摩擦元件的快速移动。
结果,摩擦元件正在改变其位置,而滑块不跟随。这个阶段叫做滑移阶段(slip-phase)。通过重复这个步骤,可以实现滑块的宏观移动。此模式称为步进模式(Step mode)。
|
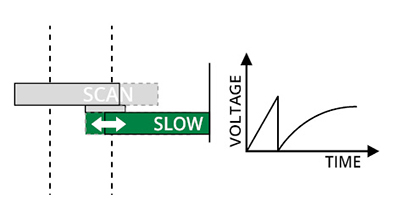 |
在粘固阶段(Stick-Phase),可以通过缓慢增大或缩短压电驱动器来在亚纳米分辨率上移动滑块。 |
配置选件
压电位移台具有各种配置选项,如每个产品页面上的规格参数表所示。
在这里,您可以找到有关每个选件功能和优点的更深入的说明。
位置传感器(Position sensors)
| Sensor Type | S | SC | L | I |
|---|---|---|---|---|
| 工作原理 | 光学 | 光学 | 光学 | 电感 |
| 分辨率[nm] | 1 | 1 | 4 | 300 |
| 参考位 | 单一参考位标记 | 多参考位标记 | 终点或多参考位标记 | 终点 |
| 适配控制器 | MCS2,SDC2,CU | MCS2 | MCS2,SDC2,CU | EMS,CU |
| 真空度适配 | 低至1 E-11 mbar | 低至1 E-11 mbar | 只适用大气压力 |
低至1 E-6 mbar
|
低温(Cryogenic)
针对需要非常低的温度(mK范围)的应用,我们的SLC和SR系列位移台的低温版本是使用的。详细信息请参考 Environment Specific Stages页面的低温部分内容。
真空(Vacuum)
位移台的标准配置为在大气压环境下工作。对于高真空(HV,1E-6 mbar)和超高真空(UHV,1E-11 mbar)应用,可以提供专用的配置。由于SmarAct是一家完整解决方案提供商,我们提供单维或多维系统,包括真空和超高真空兼容的电缆或穿仓器件。详细内容请查看 Environment Specific Stages 页面中关于超高真空的内容部分。
非磁性材料(Non-Magnetic Materials)
多款位移台都有非磁性版本的配置。在大多数情况下,它们的外形尺寸保持不变。详细内容请查看 Environment Specific Stages 页面中关于非磁性压电位移台的内容部分。
闭锁力(Higher Blocking Force)
闭锁力是在粘滑阶段在不打滑的情况下所能承受的最大外力。对于某些应用,当所需要的闭锁力高于产品参数表中的规格时,可以在不改变其外形尺寸的情况下,增加1.5N的闭锁力。
恒力弹簧(Constant Force Spring)
当应用需要位移台提升垂直方向安装的恒定负载时,可以集成恒力弹簧装置来补偿有效负载的重量。
U型底座(U-Shaped Base)
SLC系列的位移台也拥有U型底座的型号,而不是矩形标准底座。这种特殊的形状大大提高了位移台的机械强度。由于U型底座的尺寸不同,位移台本身的宽度将增加6毫米,不过安装孔的形式和标准型号一致。
 |
 |
|---|---|
| SLC系列位移台-标准底座 | SLC系列位移台-U型底座 |